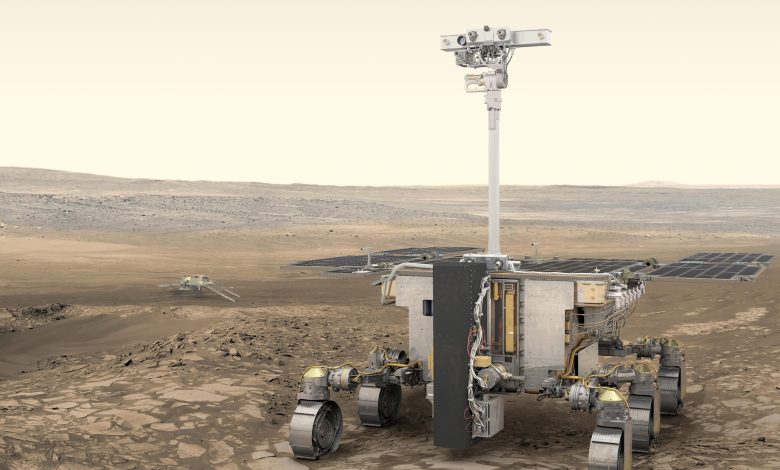
Lead Image: Artist’s impression of ESA’s ExoMars rover (foreground) and Russia’s science platform (background) on Mars. Credit: ESA/ATG medialab
The largest parachute set to fly on Mars has completed its first successful high-altitude drop test, a critical milestone for ensuring the ExoMars mission is on track for launch in 2022. Both the first and second stage parachutes have now successfully flown this year.
A pair of high-altitude drop tests took place in Oregon on November 21 and December 3 as part of the ongoing parachute testing to ensure the safe delivery of the ExoMars Rosalind Franklin rover and Kazachok lander to the surface of Mars in June 2023. The 35 m wide subsonic parachute – the largest ever to fly on Mars – was the focus of the latest campaign. One parachute was manufactured by European company Arescosmo, with the back-up provided by US-based Airborne Systems.
“Both parachutes deployed and flew beautifully,” says Thierry Blancquaert, ESA Exomars program team leader. “We maximized the lessons learned from all previous tests and with this double success following the impressive first stage parachute deployment earlier this year, we’re really on the road to launch. We have demonstrated we have two parachutes to fly to Mars.”
🪂 🪂 Double drop test success!
👍 We’re pleased to report that in our latest @ESA_ExoMars high-altitude parachute drop test, both manufacturer’s parachutes deployed and flew beautifully 👉 https://t.co/F1Vds145p3 #ExoMars #Mars pic.twitter.com/LRwZYKcCwP
— ESA (@esa) December 14, 2021
The team will continue to test to verify the robustness of the final selection of parachutes, with more high altitude drop test opportunities possible in 2022 for both the first and second stage parachute. It is expected to fly the first stage parachute from Airborne Systems, and the second stage parachute by Arescosmo to Mars, pending the outcome of the March 2022 test campaign.
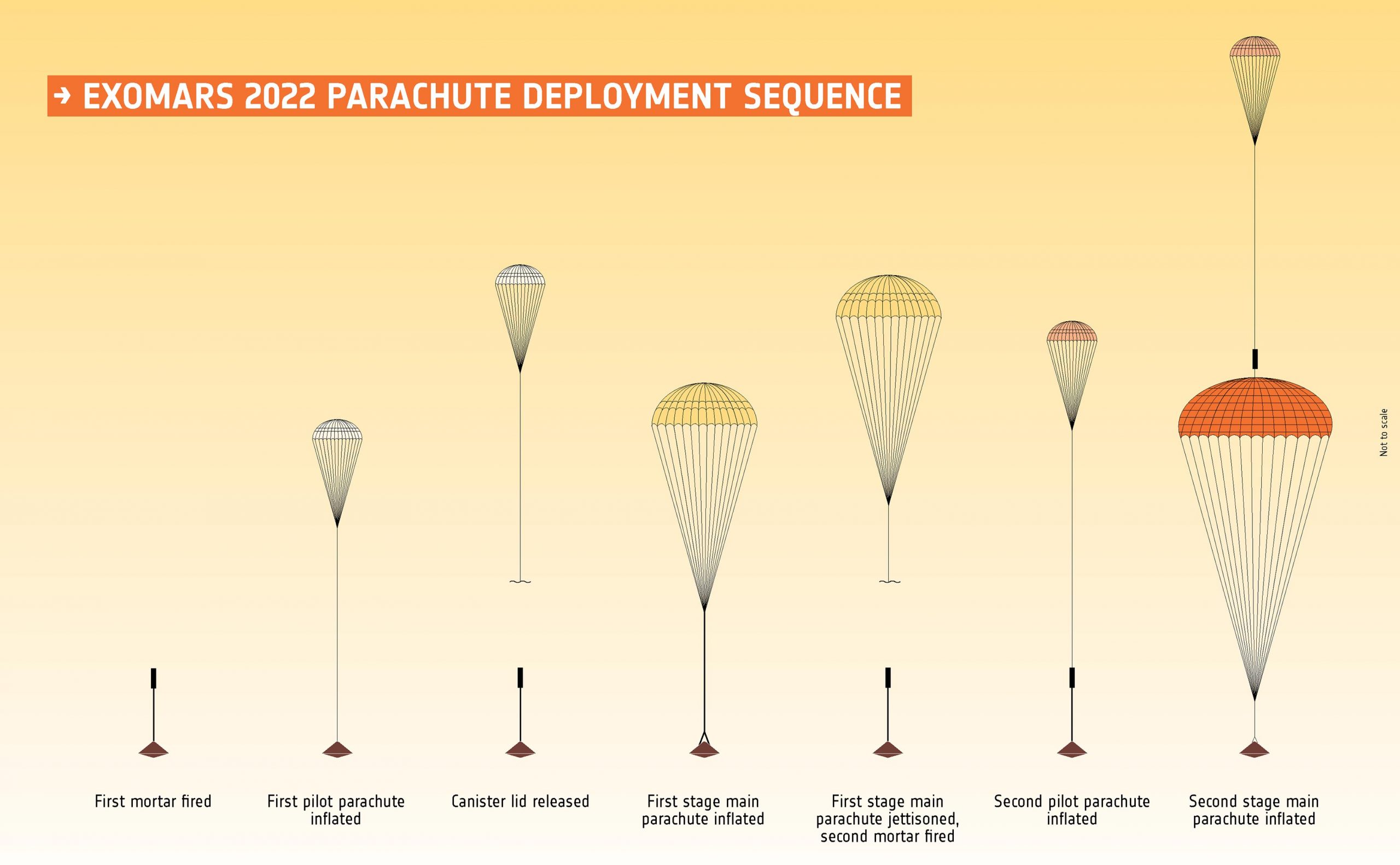
The ESA-Roscosmos ExoMars mission is scheduled for launch in September 2022. After a nearly nine-month interplanetary cruise, a descent module containing the rover and platform will be released into the Martian atmosphere at a speed of 21 000 km per hour. Slowing down requires a thermal shield, two main parachutes – each with its own pilot chute for extraction – and a retro rocket propulsion system triggered 30 seconds before touchdown. The 15 m-wide first stage main parachute opens while the descent module is still traveling at supersonic speeds, and the 35 m-wide second stage main parachute is deployed at subsonic speeds.
Adjusting and testing the ExoMars parachutes has been a priority following a series of unsuccessful drop tests in 2019 and 2020. The first high altitude success took place in June 2021 with the flawless deployment of the first main parachute provided by Airborne Systems.
In that set of tests, the 35 m-wide second stage parachute provided by Arescosmo experienced one minor damage, likely due to an unexpected detachment of the pilot chute during final inflation, but it still decelerated the drop test vehicle as expected. In the intervening months the pilot chute attachment was changed, and Kevlar reinforcements were replaced with nylon on two rings in the parachute canopy to better match the same strength and elasticity of the parachute fabric, in order to reduce the risk of tearing.
Adjustments to the parachute system are first tested on the dynamic extraction test rig at NASA/JPL to check how the release of the parachute from the bag occurs, as it would happen in the martian atmosphere. These tests can be repeated on a quick turnaround and reduce the risk of anomalies.
High-altitude drop tests require complex logistics and strict weather conditions, making them difficult to schedule, and are often aborted at the last moment if the situation changes. The wind speed and direction at various altitudes has to be considered for a smooth ascent of the balloon and the on-ground recovery of the hardware given that the drop zone can only be accessed via helicopter, and must not fall over populated areas. There must also be no rain, clouds or fog, and the humidity must be such that condensation does not accumulate on the huge envelope of the 335 000 m3 balloon as this would cause a large quantity of water to fall on the drop test vehicle and its electronics.
Once these requirements have been met and the green light given to inflate and launch the helium-filled stratospheric balloon, the drop test vehicle is lofted to an altitude of 29 km. Following release from the balloon, the pilot chute deployment is initiated, which in turn pulls the main parachute from its doughnut bag.
“Everyone working on this campaign – both on site and off – had to wait a long time in this launch window for the right weather conditions, but we are delighted with the outcome,” says Thierry. “After recovering the parachutes we observed only a handful of very tiny and insignificant 1-2 cm sized tears and friction searing on the two parachute canopies. We can certainly fly as-is without any concern, but adjustments are still possible, and we will carefully scrutinize the results of the next tests early next year.”

The parachutes are just one element of this complex mission, which, after launch, will see a carrier module transport the rover and surface platform to Mars inside a descent module. Significant progress has been made across many areas of the mission in the last months, as the functional testing phase draws to a close and attention shifts to the launch campaign in Baikonur.
“Thanks to the incredible efforts of all our partners, we are wrapping up loose ends in this highly complex mission to ensure we have a robust mission to fly to Mars,” adds Thierry. “In parallel, launch campaign preparations are proceeding at full steam and we’re looking forward to ship the spacecraft modules and ground support equipment to Baikonur in late March and early April. An exciting year is to come.”
All parachute system qualification activities are managed and conducted by a joint team involving the ESA project (supported by the Directorate of Technology, Engineering and Quality), Thales Alenia Space Italy (ExoMars prime contractor, in Turin), Thales Alenia Space France (parachute system lead, in Cannes), Vorticity in the UK (Parachute design and test analysis, in Oxford) and Arescosmo in Italy (parachute and bags manufacturing, in Aprilia). NASA/JPL-Caltech has provided engineering consultancy, access to the dynamic extraction test facility, and on-site support during these tests. The extraction tests are supported through an engineering support contract with Airborne Systems, who also provided NASA’s Mars 2020 parachutes, and by Free Flight Enterprises for the provision of parachute folding and packing facilities. Airborne Systems is also providing parachute design and manufacturing services since 2021.
Near Space Corporation provide the balloon launch services in Oregon. The Swedish Space Corporation Esrange facility provides the balloon launch services in Kiruna.
The ExoMars mission will launch on a Proton-M rocket with a Breeze-M upper stage from Baikonur, Kazakhstan, in the September 20 – October 1, 2022 launch window. Once landed safely in the Oxia Planum region of Mars on 10 June 2023, the rover will drive off the surface platform, seeking out geologically interesting sites to drill below the surface, to determine if life ever existed on our neighbor planet. The ExoMars program, a joint endeavor between ESA and Roscosmos, also includes the Trace Gas Orbiter, which has been orbiting Mars since 2016. As well as its own science mission, Trace Gas Orbiter will provide essential data relay services for the surface mission; it is already providing data relay support for NASA’s surface missions, including the arrival of the Mars 2020 Perseverance rover in February 2021.